
Overview
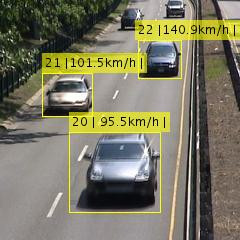
Road traffic detection and monitorization is an important problem in object tracking. In this paper we tackle the problem of tracking vehicles that are moving along a road. We propose a model based on foreground segmentation using and adaptative gaussian grayscale model, with postprocessing hole filling, area filtering and morphological closing. Then, after a block-matching based stabilization, we use a Kalman filter and a particle filter to detect the vehicles, with a speed estimation based on linear regression. Our model achieves good results both in background segmentation, with an average AUC of 0.83, and in traffic tracking, with great visual results both in vehicle counting and speed estimation.
Paper
Source Code